

近日,国际机器人研究领域权威期刊T-RO(IEEE Transactions on Robotics)在线发表了我院李星星教授团队在多传感器时空标定领域的研究成果,论文题目为“iKalibr: Unified Targetless Spatiotemporal Calibration for Resilient Integrated Inertial Systems”。硕士生陈烁龙为第一作者,李星星教授和博士生李圣雨为共同通讯作者,博士生周宇轩和硕士生杨晓滕也参与了本项研究。
集成惯性系统(通常集成了IMU和其他外部感知传感器,如雷达、激光雷达和相机等)已在现代机器人中广泛应用,用于自运动估计、运动控制或自主探索等任务。为了提高系统的精度和鲁棒性,通常会将多种传感器集成到一起,来进一步提升系统的可用性(主要是在故障容忍、感知能力和环境适应方面)。此类系统往往需要进行准确一致的时空标定,以为后续的多源融合提供统一的时空框架。
目前大多数标定方法(见图1)通常针对的是特定的集成惯性系统,比如面向Visual-Inertial或者LiDAR-Inertial系统;或者往往仅关注外参的标定,假定了多传感器系统已在硬件层面被精确地时间同步;或者通常需要人造标定靶标,缺乏一定的便利性。
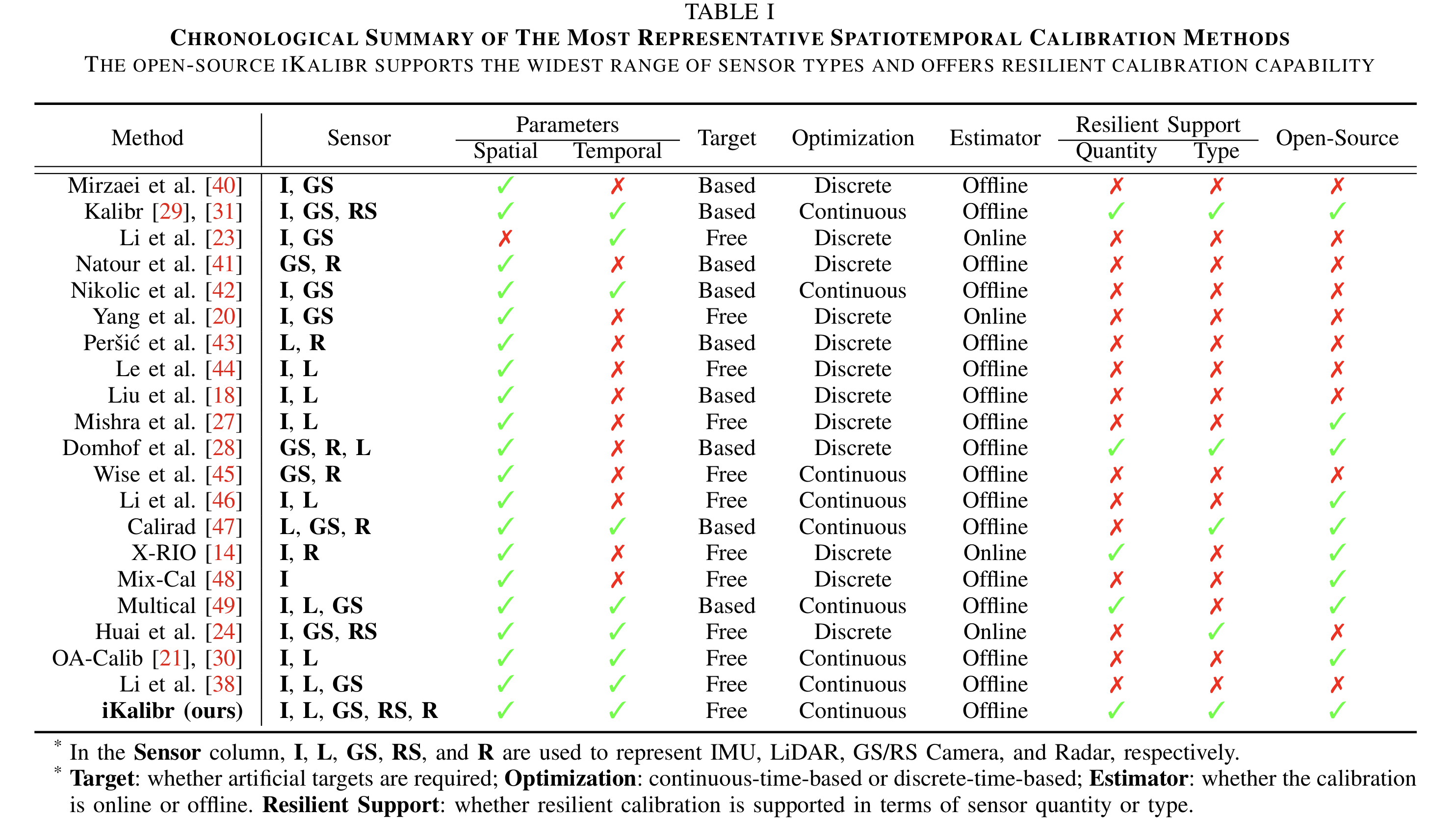
图1 多传感器时空标定领域多种方法的整理和对比
针对以上的问题,研究团队提出iKalibr:一个面向弹性集成惯性系统的无靶标时空标定框架,该框架克服了现有方法的局限性,并能实现精确、一致的多传感器时空标定。目前,iKalibr支持四种常用传感器的一次性联合标定,包括IMU、4D毫米波雷达(Radar)、激光雷达(LiDAR)及视觉传感器(Camera)。为验证该框架的可行性并评估其标定性能,研究团队开展了充分的实测实验(见图2)。实验结果表明,iKalibr能够实现高精度的时空参数标定。为促进相关领域研究,相关工作已在GitHub平台开源(链接见文末)。

图2 iKalibr在多种公开数据集上的标定示意图
据悉,IEEE Transactions on Robotics (T-RO),机器人学领域公认的三大顶级期刊(Science Robotics,T-RO,IJRR)之一,平均年文章量200篇左右,发表成果涵盖了同时定位与建图、运动规划和运动控制等机器人自主导航中的重要研究方向。许多广为人知的学术成果,如ORB-SLAM系列、VINS-Mono系列、FAST-LIO系列、FAST-LIVO2等出色的工作,均发表在T-RO期刊,代表了机器人领域最先进的重大进展。
论文获取:https://ieeexplore.ieee.org/document/10848334
代码仓库:https://github.com/Unsigned-Long/iKalibr.git
演示视频:https://www.bilibili.com/video/BV1Dm421G7FV
细节视频:https://www.bilibili.com/video/BV1MFUGYGEpU
文字:陈烁龙 范清彪
审核:闫利 胡俊英