

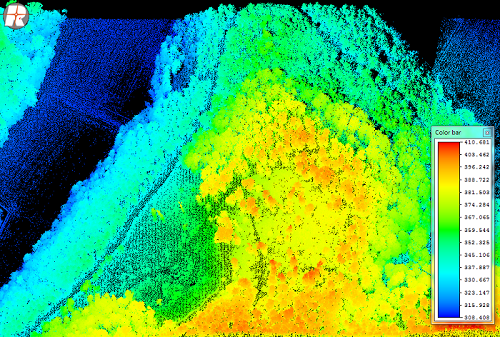
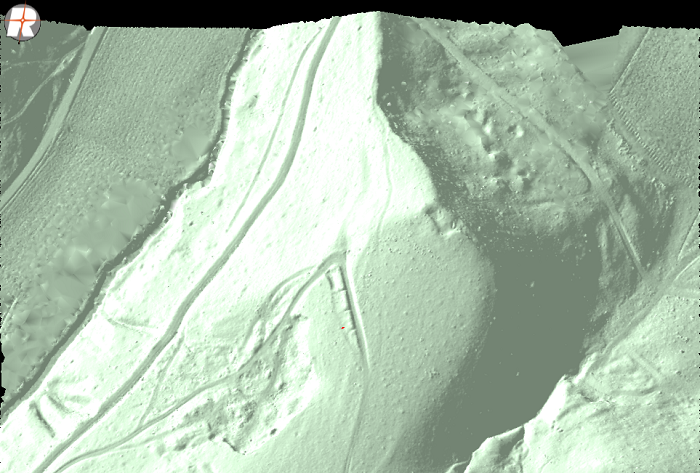
扫描数据——按照高度进行色彩显示
目前机载雷达数据及地面三维激光扫描数据被应用于各种规模的项目,但用户经常面临不同数据平台(机载雷达、地面移动、地面三维激光扫描以)来进行数据获取及后处理。RISCAN PRO软件已经从单纯的数据采集升级成为了能够进行各种三维扫描数据后处理的软件包。使用RISCAN PRO来处理机载雷达数据,展示软件内置的独立地面点非地面点的过滤功能,数字高程模型,及低高层植被过滤功能。
数据是由RIEGL的NP680i机载雷达系统采集,数据采集和地理参考由RIPROCESS里面完成,因此我们可以直接将数据导入到RISCAN PRO中,为了处理方便我们可以适当的调整POP矩阵(即点云相对位置和方位)可以通过双击项目管理(project manager)按钮进行修改,我们可以在扫描站(scanposition)或者在对象(object)下的polydata子选项中讲数据导入。
一旦数据顺利的导入后,我们就可以进行数据的数字高程模型创建。对于数字高程模型而言,对进行点云的地表点和非地表点分离删除是很必要的,所以我们创建一个光栅矩阵模型并覆盖整个选区,并根据栅格网设置密度的节点寻找到该节点Z值最低的点数据,通过这点再建立一个粗略的地形模型,用于分离地表及非地表点,以下有个关于这个RISCAN PRO功能的简单指导。
1、栅格网过滤器(Raster Filter):通过2.5D Raster对数据进行过滤,这个过滤器可以通过右键点击工程项目下的POLYDATA的名字找到,选择Filter data便会跳出一个RISCAN PRO的专业过滤工具界面,选择并设置工具界面里的2.5D Raster属性选项卡,选择一个参考面,设置栅格网的密度和搜索条件True minimum,点击ok键便开始对数据进行过滤同时会该工程下面创建一个新的polydata数据。
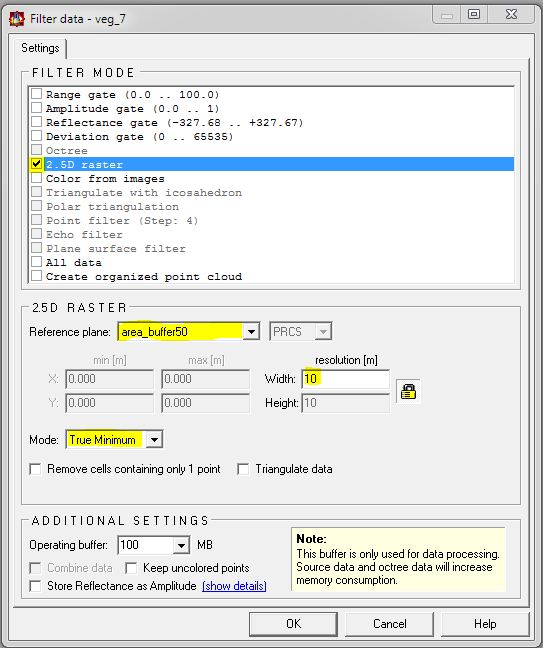
Raster Filter设置
2、三角网模型(Triangulation):在试图中显示该polydata数据,并选择所有的点并点击"Plane Triangulation"创建网格模型。
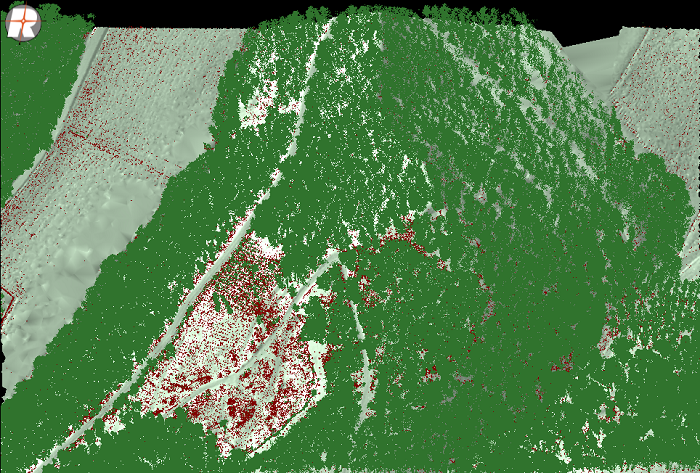
3、地表植被过滤(Separation):在视图中显示原始点云数据,并点击显示属性的“surface comparison“即表面模型比较工具,并将之前过滤的粗略模型拖拽到视图,并设置其为比较的基础对象,同时在比较工具中选择点相对粗略模型距离的最大和最小值,点击计算,软件就会自动通过不同的颜色来表示所有点相对粗略模型的距离,同时勾选选择带颜色的点云,反选并删除距离粗略模型较远的点就可以得到去除植被及地上物的点云数据,同时该数据会自动保存在该子文件目录下。
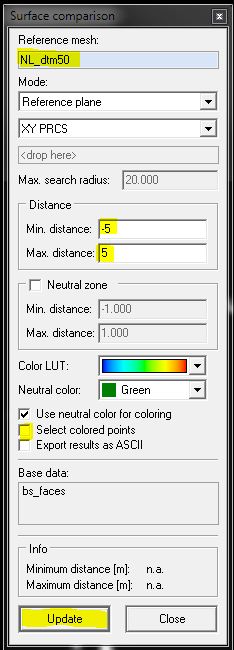
surface comparison设置
通过改变第一到第三步的栅格网的密度及表面模型比较的最大和最小值迭代计算,直到表面模型及点的过滤完善,便可以得到非常完善的数字地表模型数据点云。下表提供了栅格网单元格大小,单元格密度设置及设置方法。请记住这些不是固定,可根据实际的项目需求进行不同的设置。最后一次的迭代计算为我们提供的点云,我们就可以直接用作DTM(数字地面模型)的生成。
#1 | 10 | 15 |
#2 | 5 | 7 |
#3 | 2.5 | 3 |
#4 | 0.75 | 0.5 |
#5 | 0.5 | 0.1 |
下一步是定义植被层。为了演示,我们将创建两个点云数据。一米以内的低植被的地表点云数据,另一个是一米以上高植被的点云数据。使用“表面模型比较”功能。创建的DTM模型将其作为参考面。将其都拖拽到视图中并选择显示属性中的表面模型比较工具,设置距离最小,并且距离为0到1米点击更新命令,这个时候我们就得到一个带颜色偏差的点云数据,勾选选项中的选择彩色点,再一次点击更新按钮,同时点击创建polydata,这个时候低植被的点云数据就被创建了。在比较工具中同样更改设置距离最小值为1米最大值为50米,点击更新同时创建新的polydata数据便得到了高植被数据点云。
植被层
去除植被后的DTM(数字地面模型)