

摘 要: 随着社会的发展,人们对信息的需求不再仅仅局限于传统的二维模式,对三维空间信息的兴趣越来越浓,特别是对现势性的三维空间信息的需求正与日俱增;奥地利Riegl公司集其在激光雷达扫描技术上近40年研发的优势,将Riegl最新的全景360度激光雷达扫描仪,与IMU/GPS惯导系统等技术集成,并开发出数据后处理软件,使得快速获取、制作高精度、高分辨率的三维空间模型成为可能。本文对Riegl移动激光雷达扫描系统进行了介绍,并对其应用进行了探讨,希望能增进大家对移动激光雷达扫描系统及其应用前景的认识。
关键词:Riegl 移动激光雷达扫描系统
1.引言
移动测图技术的发展有一段历史了,但以前的技术使用的都是数码摄像机而不是激光扫描仪。使用数码摄像机进行移动测图的缺点是它不能直接生成三维图形,这在如今三维空间信息技术发展和需求飞速膨胀的年代,注定了其被淘汰的命运。
Riegl全新一代的VMX-250是一款高精度、高分辨率的三维激光雷达移动扫描系统。该系统将Riegl VQ-250全景360°扫描仪、IMU/GPS惯性导航系统集成在一个紧凑、易安装拆卸的刚体云台中;该云台还留有安装数码照相机或者数码摄像机的位置,使得VMX-250系统可以根据客户的不同需求进行数据获取,进而生成不同类型的三维空间信息数据;同时,VMX-250安装云台易于拆装,可以适用不同的移动平台,例如汽车、火车或者船等,这样就大大扩宽了VMX-250移动激光雷达扫描系统的应用领域。
2.系统介绍
2.1 系统组成
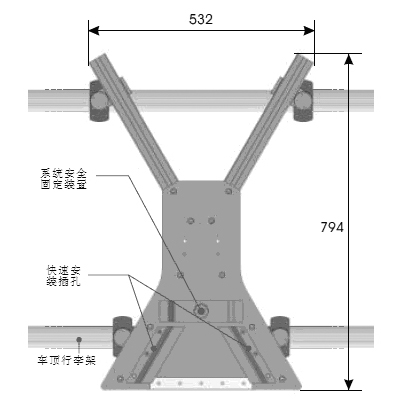
图1:减震、固定平台
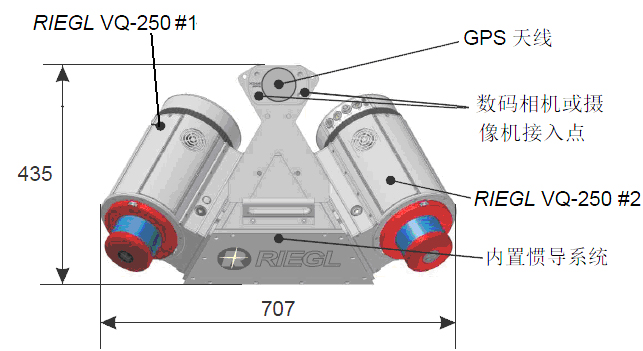
图2:Riegl VMX-250集成云台
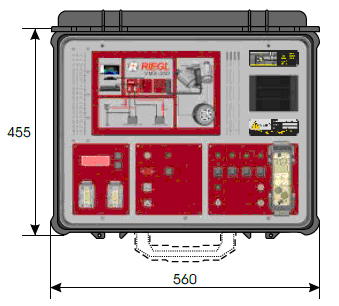
图3:控制部件
Riegl VMX-250移动激光雷达扫描系统包括:
Ø 系统安装减震平台(如图1)
Ø Riegl VMX-250集成云台(如图2)
l 两台Riegl VQ-250激光扫描仪
l 内置IMU/GPS惯性导航系统
l GPS接收天线
Ø 控制数据获取的电脑
Ø 与电脑、扫描仪相连的控制部件(如图3)
2.2 系统性能
2.2.1 Riegl VQ-250激光扫描仪
Riegl VQ-250激光扫描仪,是一款全景360°无缝圆形高速线状扫描仪。它采用对人眼无害的I级安全近红外激光,单台激光发射频率高达300,000赫兹,扫描速度能达到100线/秒,测距可达500米;在数据采集过程中,对波形进行实时数字化和在线波形分析,因此能够提供精度至5毫米的激光点云数据;它同样采取了Riegl最先进的可以接收无穷次回波的技术,故能够探测到被栅栏或者灌木遮挡的物体,并且输出包含信息丰富的16比特的回波信号,可以用于研究物体的反射率、强度等特征;
Riegl VQ-250 激光扫描仪采用的是旋转镜方式,角度分辨率达0.001°;内置有GPS时间同步系统,因此便于进行数据后处理;正常工作电压为18-32伏直流电,功率为65瓦;工作温度在-10°C~+40°C,保存温度在-20°C~+50°C,重量只有11公斤,因此便于携带。
2.2.2 IMU/GPS 惯性导航系统
Riegl VMX-250移动激光雷达扫描系统,内置有IMU/GPS惯性导航系统,该系统与Riegl VQ-250激光扫描仪同集成于一个云台上,这样就保证了Riegl VMX-250系统的稳定性。同时该系统内还置有直接惯导辅助系统(Direct Inertial Assistant),该系统能在GPS信号较差,城区GPS信号被遮挡或者移动平台转动太大而致GPS死锁的情况下,提供精确的导航参数,确保了数据解算的精度。
2.3 工作流程

图4:Riegl VMX-250工作流程
根据客户的需求,在数据获取过程中,可以添加数码照相机或者数码摄像机,同时如果客户需要绝对坐标的点云数据,那么还需布置GPS地面基站,进行差分GPS(DGPS)解算,用来生成轨迹文件,将绝对坐标值赋给点云。
如图4所示,在数据获取过程中,装有RiACQUIRE软件的电脑控制激光扫描仪进行数据获取,同时IMU和GPS会记录方向和位置数据,IMU、GPS、扫描仪之间通过GPS时间进行同步起来。若有GPS地面基站,GPS地面基站接收的GPS数据与Riegl VMX-250移动系统中的GPS记录的数据经过差分处理,然后连同IMU记录的数据就能生成移动平台的轨迹文件,用于数据处理使用。
在数据处理阶段RiACQUIRE获取的扫描数据,经RiPROCESS和RiWORLD处理后就变成了带有绝对坐标信息的点云数据,该点云数据还可以经过RiPROCESS转换成其他如:LAS,ASCII等格式的数据,便于客户根据自己的需要来对点云数据进行处理、应用和建模。
3.系统应用
Riegl VMX-250移动激光雷达扫描系统的特性,使其主要应用在
l 交通基础设施测图
公路、铁路、码头等快速测图
l 城市建模
l 隧道断面测量
l 施工现场的快速测图
l 矿山/料堆的测量
l 网络规划
l 自动导航系统的快速三维数据采集
公路测量
铁路测量
城市测量
城市三维模型
数字城市
海岸线测量
