

近日,国际物联网权威期刊《IEEE Internet of Things Journal》(IOTJ, 影响因子:10.238)在线发表了我院在多传感器融合导航方面的研究成果,论文题目为“Tightly coupled integration of GNSS, INS and LiDAR for vehicle navigation in urban environments”。测绘学院硕士研究生李圣雨为论文第一作者,李星星教授为通讯作者。
准确且连续的位姿估计是位置驱动的物联网应用的关键基础。对于实现城市复杂环境下高精度导航定位而言,如何克服单一传感器定位的局限性、充分利用多源异构信息具有重要意义。然而目前的GNSS/INS组合导航技术在信号长时间中断时仍然存在误差累积的问题,而激光SLAM可以通过帧间匹配、地图匹配等方式获得准确的相对位姿估计结果,因此利用激光雷达有效信息来提高卫星导航技术的精度和鲁棒性具有重要价值。
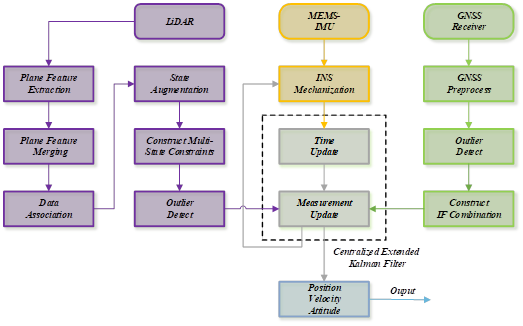
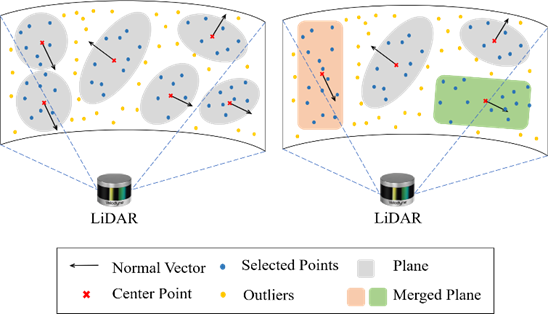
本文提出了基于扩展卡尔曼滤波的GNSS/INS/LiDAR三者紧组合框架,在原始观测值层面融合了GNSS载波相位观测值、惯导数据、LiDAR平面特征信息。相比于在结果层面融合的松组合框架,紧组合可以有效克服单一传感器的局限性和脆弱性,增强集成系统抵抗传感器故障的能力。在此基础上,本文提出了一种改进的基于滑动窗口的平面特征跟踪方法:首先从LiDAR原始点云中提取平面特征,然后融合表示同一平面的特征对象,最后在连续LiDAR帧之间建立平面特征的数据关联。为了确保数据关联的准确性,本文采用双向距离检核、RANSAC、卡方检验等方法设计了多种检核机制。
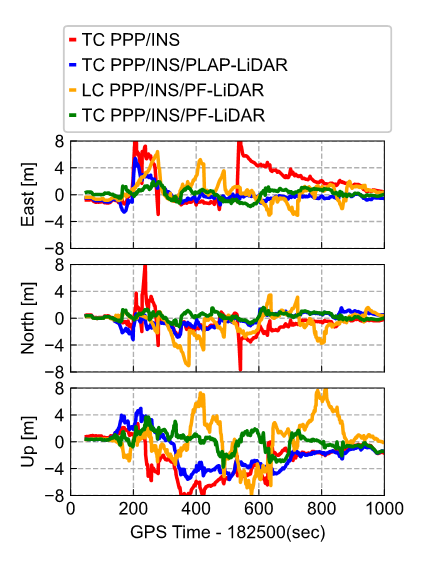
利用不同卫星观测条件下的车载实验表明,引入LiDAR平面特征的原始观测可以明显提高GNSS/INS紧组合方法的定位精度,即使在卫星信号严重遮挡的环境中也能够实现亚米级定位。此外通过实验发现,相比于传统点到面/点到线帧间匹配方法,本研究所提出的改进平面特征跟踪方法可以实现更稳定的数据关联,同时具有更高的计算效率。
该研究实现了城市复杂环境下准确、连续的位姿估计,为智能驾驶提供了可靠的导航定位解决方案。本研究相关算法实现在武汉大学测绘学院自主研发的卫星大地测量与多源导航软硬件平台(GREAT)之中,得到了十四五国家重点研发计划“高精度自动驾驶动态地图与北斗卫星融合定位技术”的资助。
论文链接:https://ieeexplore.ieee.org/document/9844131
图文:课题组
审核:胡俊英