

近日,国际信息融合权威期刊《Information Fusion》(影响因子:17.564,在Computer Science领域中排名第一)发表题为“Multi-GNSS PPP/INS/Vision/LiDAR tightly integrated system for precise navigation in urban environments”的研究成果。测绘学院博士研究生李圣雨为第一作者,李星星教授为通讯作者。
近年来,随着自动驾驶等新兴技术的发展,准确、连续和无缝的高精度导航定位服务变得尤其重要。目前,导航定位技术的应用环境日益复杂,传统的基于单一传感器的导航定位技术无法满足高精度的导航定位需求。因此如何充分发挥车载多源传感器之间的互补特性,有效解决单一导航系统的局限性和脆弱性,具有重要的研究意义。
相机可以提供丰富的特征信息用于导航定位和环境感知任务,但容易受到光照、天气和动态目标的影响。而激光雷达可以直接提供环境中的纹理信息,且不受光照的影响,可以与相机进行优势互补。因此,该研究首先在全局坐标系下统一了相机和激光雷达的观测值模型,其次,以惯导为核心纽带连接相机和激光雷达观测信息,设计了两个独立的滑动窗口以用于构建视觉和激光雷达强几何约束,并利用惯导预报位置辅助视觉特征跟踪和雷达点云去畸变。最后,基于集中式扩展卡尔曼滤波,在原始观测值层面对多源数据进行融合,同时引入全球卫星导航系统(GNSS)提供全局位置信息,构建了深度集成卫星、惯性、视觉和激光雷达导航技术的多源融合框架。
实验结果表明该研究实现了城市复杂环境下准确、稳定的亚米级定位,为智能驾驶提供了可靠的导航定位解决方案。本研究相关算法实现在武汉大学测绘学院自主研发的卫星大地测量与多源导航软硬件平台(GREAT)之中,得到了“十四五”国家重点研发计划“高精度自动驾驶动态地图与北斗卫星融合定位技术”的资助。
论文链接:https://www.sciencedirect.com/science/article/abs/pii/S1566253522001506

图1 车载多源传感器集成平台
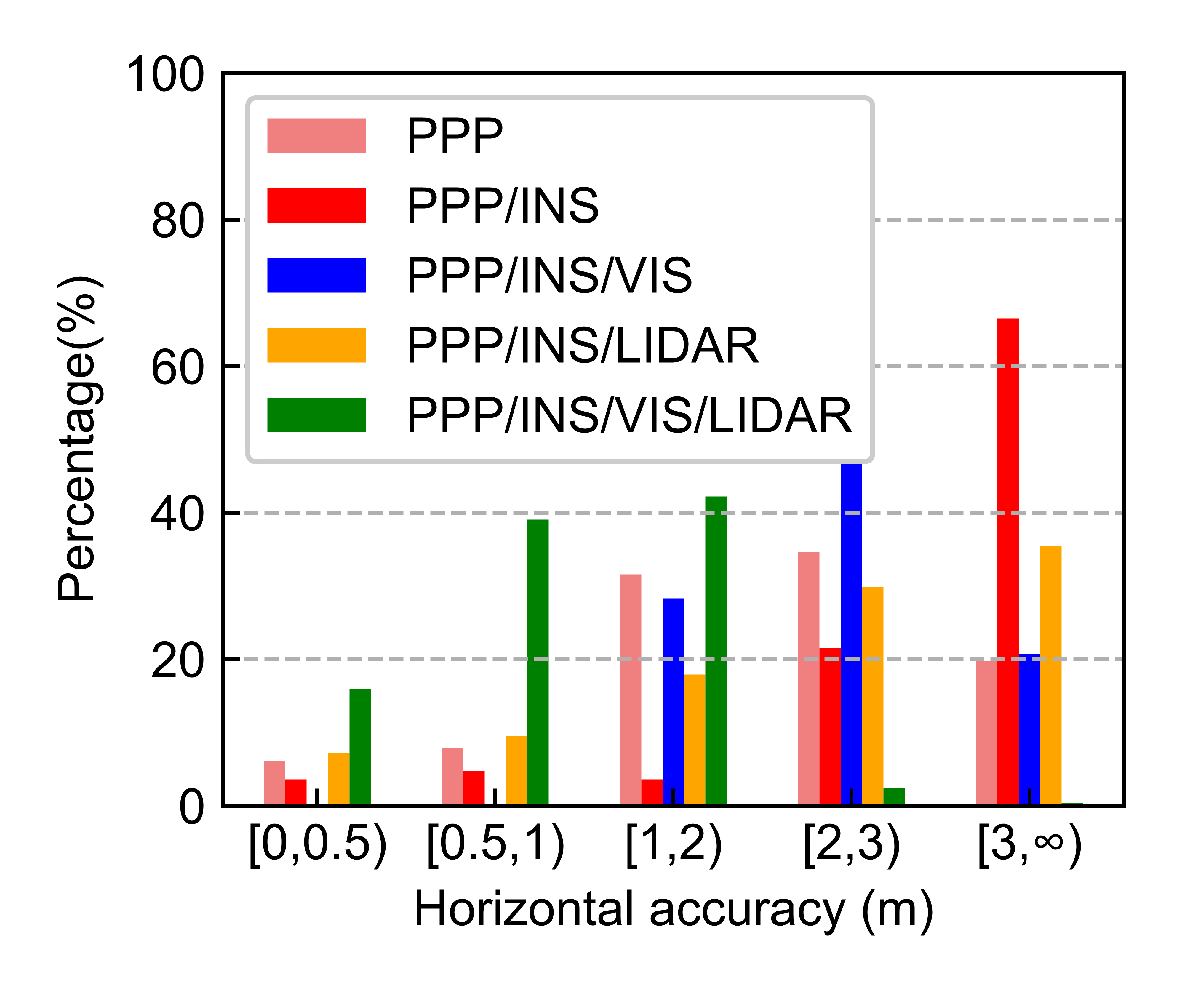
图2 不同导航解决方案水平方向的定位误差分布
文字、图片:课题组
审核:闫利